# Case of use
The ArduinoPushButtonControl class allow you to send and repeat an X-Plane command when a push button plugged into Arduino board is pressed.
# Arduino connection
| Board view | Sketch view |
|---|---|
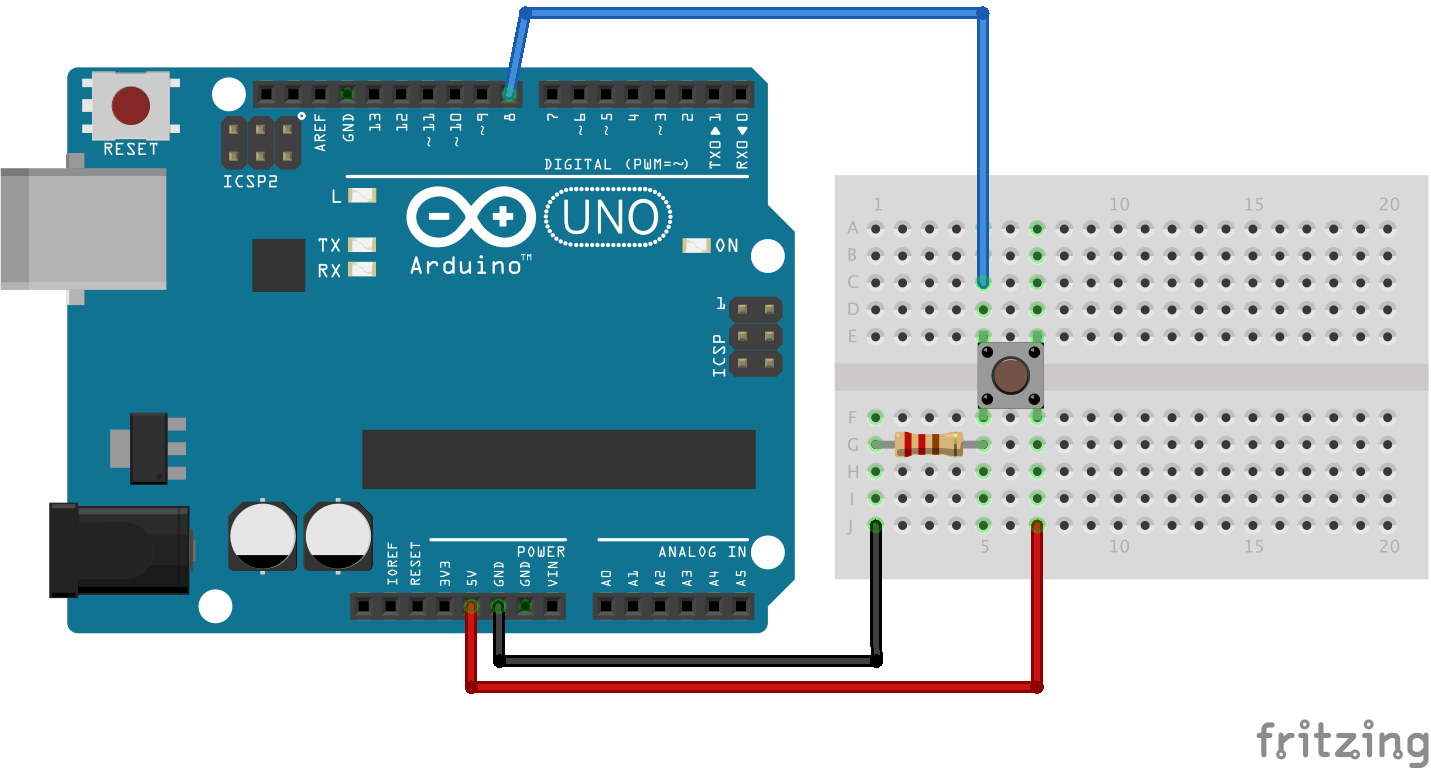 | 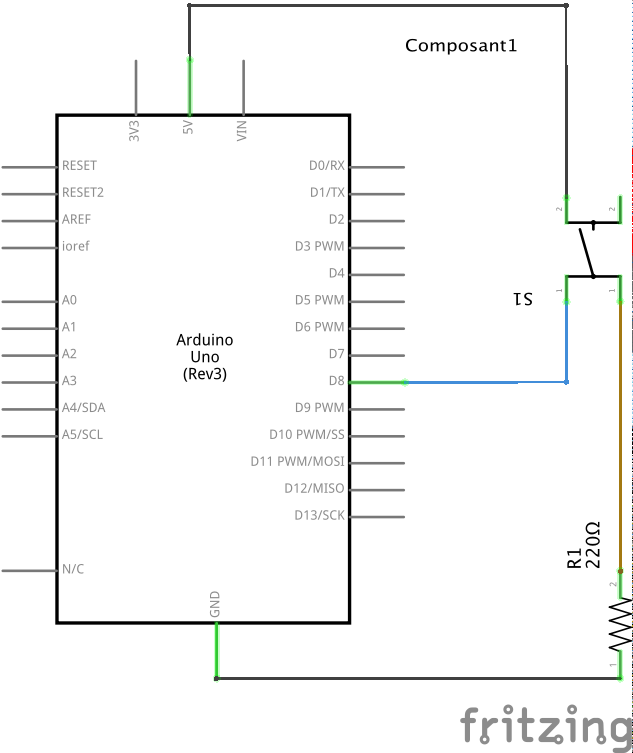 |
# Code sample
#include "src/RomgereCockpit/Application/CockpitMainApplication.h"
#include "src/RomgereCockpit/CommunicationInterface/EthernetInterface.h"
#include "src/RomgereCockpit/ArduinoControl/ArduinoPushButtonControl.h"
CockpitMainApplication *cockpitApp;
EthernetInterface *ethernetInterface;
void setup() {
ethernetInterface = new EthernetInterface( ... );
cockpitApp = new CockpitMainApplication(ethernetInterface);
//Declare and bind control with command
cockpitApp->RegisterInputControl(
new ArduinoPushButtonControl(8), //Create push button on PIN 8
new XPlaneSimpleCommand("sim/annunciator/test_all_annunciators") //Send "Test all annunciators" command to X-Plane
);
}
void loop() {
cockpitApp->Loop();
}
# Options (constructor parameters)
Here is the definition of the ArduinoPushButtonControl constructor :
Multi arduino board OFF : ArduinoPushButtonControl( uint8_t pin, uint8_t defaultState = LOW);
Multi arduino board ON : ArduinoPushButtonControl( uint8_t pin, uint8_t defaultState = LOW , int boardAddress = -1 );
Arguments definition :
uint8_t pin: PIN n° on which Toggle switch is plug.uint8_t defaultState(default: LOW) : Default state of the PIN (Idle state). Command will be send when PIN state is different of this value.int boardAddress(default: -1) : Address of slave board on which xxxx is plug (-1 = plug on main board). Available only if you previously enable the "multi board mode"