# Case of use
The ArduinoLEDControl class goal is to be bind with an input data (or group of data) from X-Plane to turn on or off an LED plugged on your Arduino board.
# Arduino connection
| Board view | Sketch view |
|---|---|
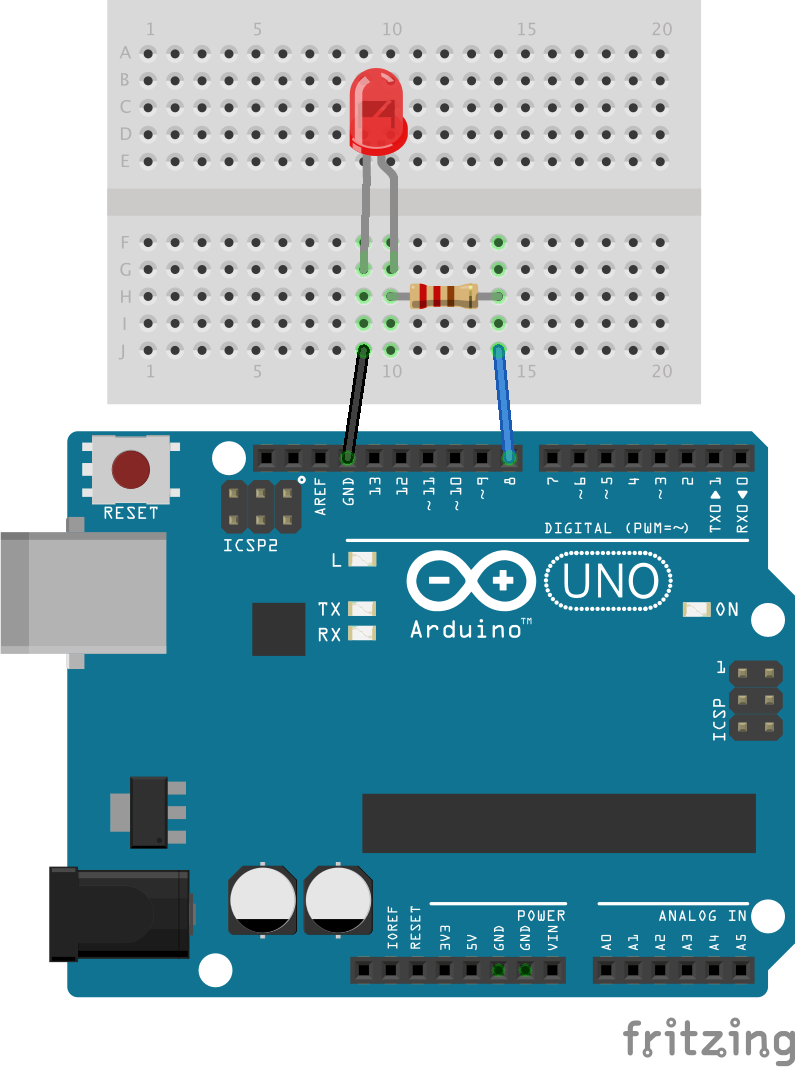 | 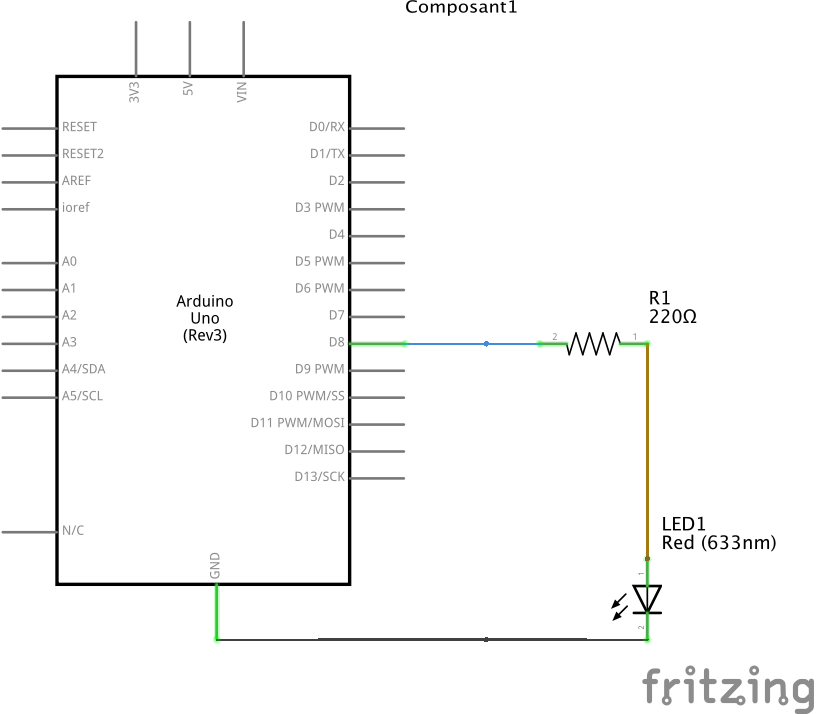 |
# Code sample
#include "src/RomgereCockpit/Application/CockpitMainApplication.h"
#include "src/RomgereCockpit/CommunicationInterface/EthernetInterface.h"
#include "src/RomgereCockpit/ArduinoControl/ArduinoLEDControl.h"
CockpitMainApplication *cockpitApp;
EthernetInterface *ethernetInterface;
void setup() {
ethernetInterface = new EthernetInterface( ... );
cockpitApp = new CockpitMainApplication(ethernetInterface);
//Declare and bind control with data
cockpitApp->RegisterOutputControl(
new ArduinoLEDControl(8), //Create LED Control on PIN n°8, bind it to
new XPlaneInputData(67, 0) //Use first data of group n°67 (nose gear indicator)
);
}
void loop() {
cockpitApp->Loop();
}
In this example, the LED plug on the PIN n°8 will be turn on or off depending on the state of the nose gear send by X-Plane (led on if gear down, led off otherwise).
# Options (constructor parameters)
Here is the definition of the ArduinoLEDControl constructor :
Multi arduino board OFF : ArduinoLEDControl( uint8_t pin, float highLEDVal = 1MM);
Multi arduino board ON : ArduinoLEDControl( uint8_t pin, float highLEDVal = 1, int boardAddress = -1);
Arguments definition :
uint8_t pin: PIN n° on which LED is plug.float highLEDVal(default: 1) : Value expected (from x-Plane) to pull on the LED.int boardAddress(default: -1) : Address of slave board on which LED is plug (-1 = plug on main board). Available only if you previously enable the "multi board mode"
# Transformation function
In some case the state of the LED could depends on multiple values of one group (example for "gear in transit" LED).
In this case the RegisterInputControl method can take a "transformation function" as third arguments.
The "transformation function" goal is to transform all datas of single group in one float value. This single float value will be pass to the ArduinoLEDControl to turn on/off the LED.
For more information please see transformation function documentation page.